-
·
Åpen-kilde (open source)
Åpen kildekode (open source) refererer til all programvare eller maskinvare hvis kildekode eller design er gjort tilgjengelig for allmennheten, slik at alle kan se, endre og distribuere den.
-
·
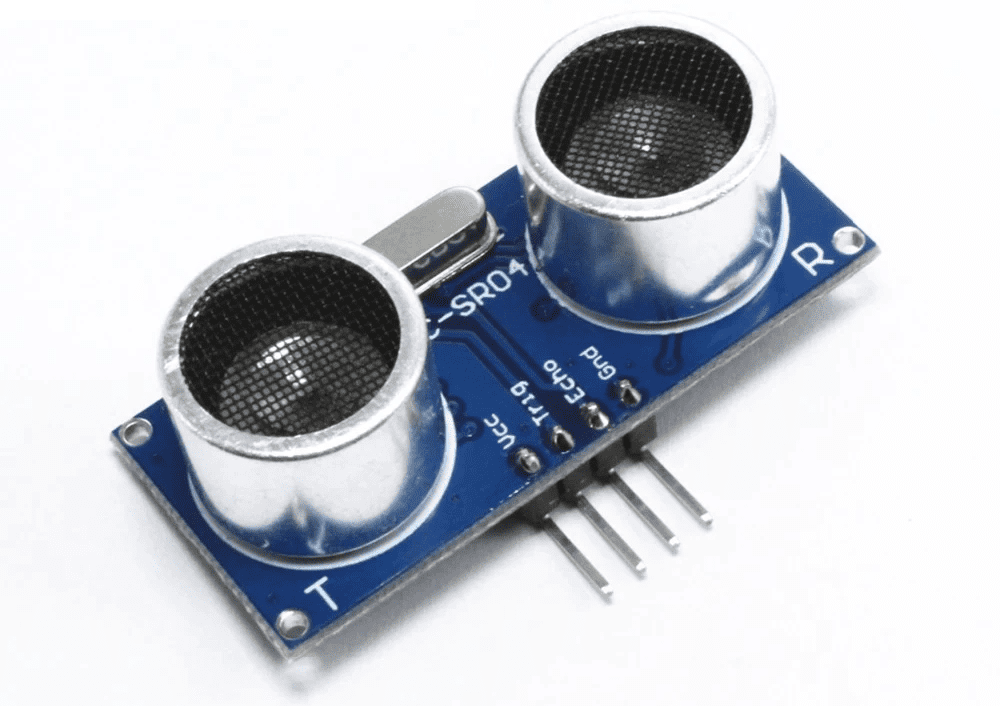
HC-SR04 Ultralydsensor
Ultralydsensor HC-SR04 er en sensor som kan måle avstand. Den sender ut ultralyd ved 40,000 Hz (40 kHz) og hvis det er en gjenstand eller hindring i veien, vil den sprette tilbake til modulen. Med tanke på reisetiden og lydens hastighet kan mann beregne avstanden.
-
·
MQ-serien gassdeteksjon
I dette eksemplet vil vi lære hvordan du oppdager gasser ved hjelp av sensorer i MQ-serien.
